| ROS、Simulink、Carsim的互联与规划、控制算法的验证 | 您所在的位置:网站首页 › simulink library browser添加 › ROS、Simulink、Carsim的互联与规划、控制算法的验证 |
ROS、Simulink、Carsim的互联与规划、控制算法的验证
|
a、选择topic的来源 b、 编辑topic的名称,输入/control,与ROS的talker节点里的topic对应 c、选择msg的类型,与talker节点里的topic的msg对应 总线选择器的设置添加总线选择器模块bus selector,以subscribe的msg引脚作为它的输入,并双击进行参数设置 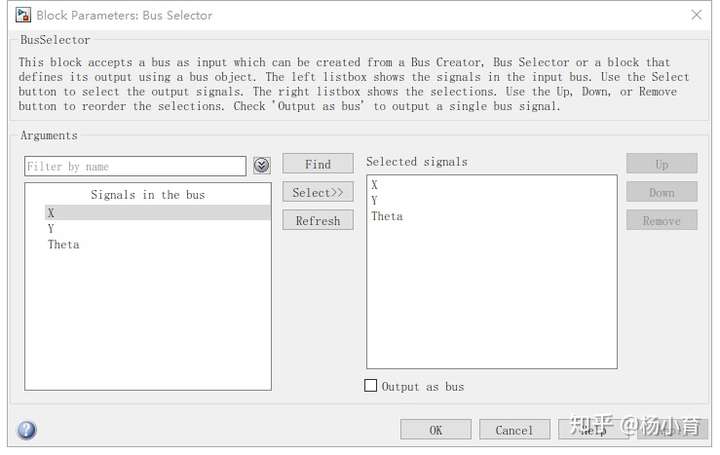
使用select按钮进行bus selector输出引脚的定义 发送节点的定义从Simulink library browser中的ROS工具箱添加空白消息模块blank message,该模块用于创建ROS消息,并双击进行参数设置 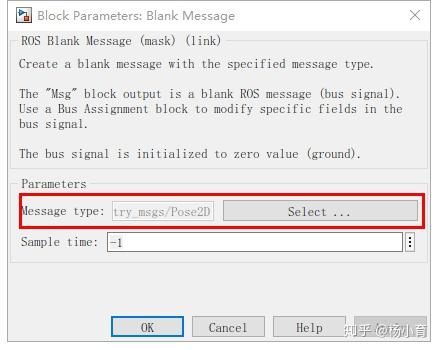
Message类型与ROS中的listener节点中的消息类型一致 从Simulink library browser中添加bus assignment模块,并双击打开如下窗口,使用select按钮进行输出通道设置 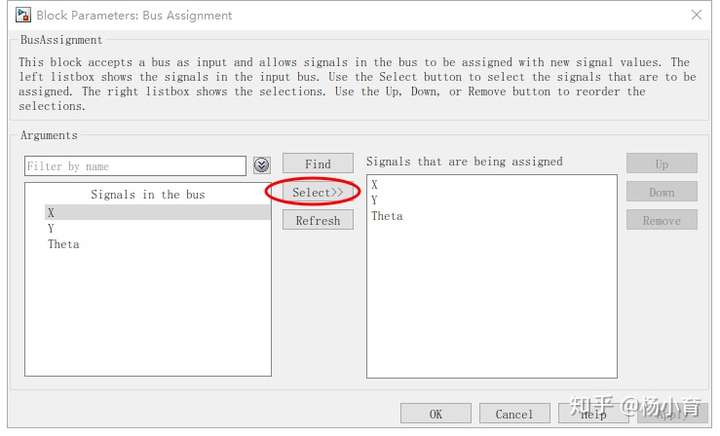
从Simulink library browser中的ROS工具箱添加publish模块,并双击进行参数设置 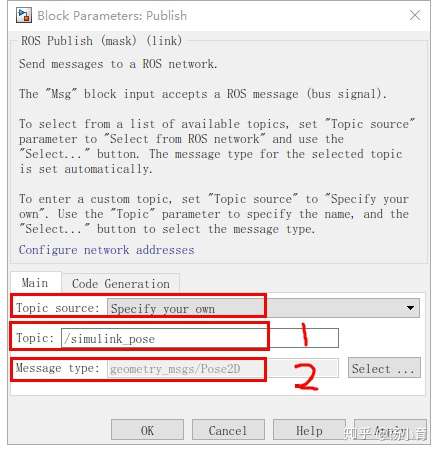
Topic为/simulink_pose,与ROS中的listener节点的话题名字对应 Message的类型与listener节点的消息类型对应 4、PC2的IP设置选择Simulink菜单栏中的tools项,如下图所示进入到Configure Network Address项 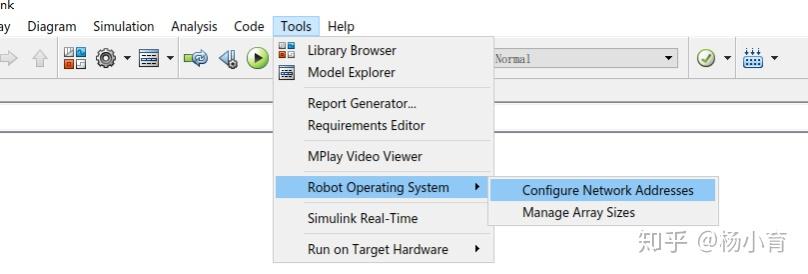
上述操作将弹出以下窗口 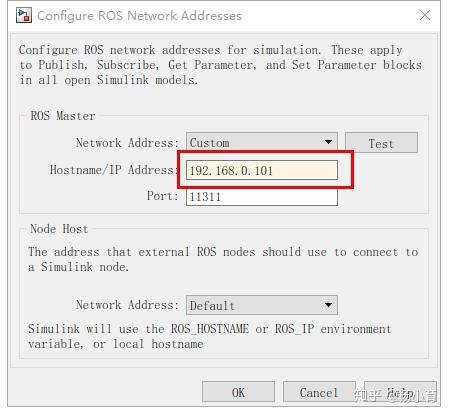
红色圈为PC1的IP地址 5、启动a、首先启动PC1上的ROS收发节点 b、PC2:在MATLAB的命令窗口输入以下指令,启动Simulink中的节点 
其中192.168.0.101为PC1的IP地址,192.168.0.100为PC2的IP地址 |
【本文地址】
公司简介
联系我们